机器人|电子DIY项目:Arduino 避障机器人
文章图片
【机器人|电子DIY项目:Arduino 避障机器人】
文章图片
机器人技术是一个有趣且快速发展的领域 。 机器人技术的应用随着技术的发展而增长并且随着不同的应用 , 移动机器人的数量及其复杂性也在增加 。 这里设计了一个简单的“避障机器人”项目 。
移动机器人导航技术有很多类型 , 例如路径规划 , 自我定位和地图解释 。 避障机器人是一种自动移动机器人 , 可以避免与意外障碍物发生碰撞 。
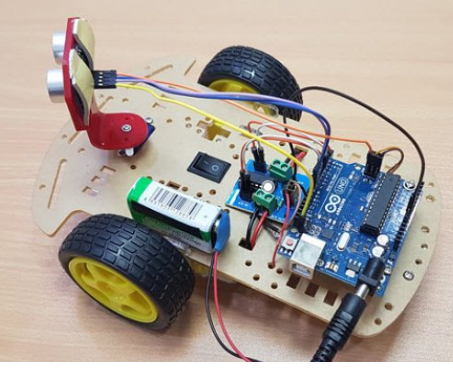
在这个项目中 , 设计了一个避障机器人 。 这是一个基于Arduino的机器人 , 使用超声波测距仪传感器来避免碰撞 。
目录
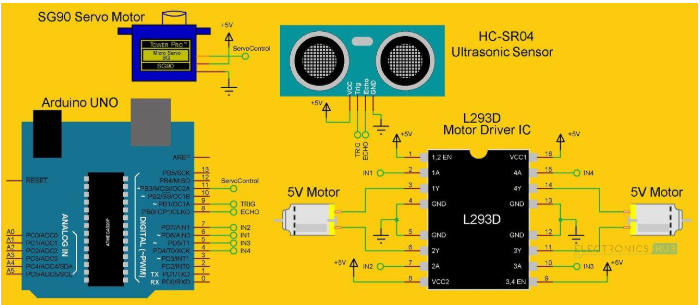
电路原理图
所需硬件
- Arduino Uno
- 超声波测距仪传感器( HC–SR04 )
- 电机驱动器IC ( L293D )
- 伺服马达(Tower Pro SG90)
- 减速电机x 2
- 机器人底盘
- 电源供应
- 电池接头
- 电池座
Arduino Uno有14个数字I / O引脚 , 其中6个用于此项目 。
HC – SR04它是超声波测距仪传感器 。 它是基于非接触式的距离测量系统 , 可以测量2cm至4m的距离 。
L293D它是一个电机驱动器 , 可以为两个电机提供双向驱动电流 。
伺服马达Tower Pro SG90是一款简单的伺服电机 , 可以在每个方向上旋转90度(总共约180度) 。
使用Arduino的避障机器人设计Arduino是机器人的主要处理单元 。 在该项目设计中 , 使用了14个可用的数字I / O引脚中的7个 。
超声波传感器连线介绍:
1. 超声波传感器具有4个引脚:Vcc , Trig , Echo和Gnd 。
2. Vcc和Gnd连接到Arduino的+ 5v和GND引脚 。
3. Trig(Trigger)分别连接到Arduino UNO的第9针 。
4. Echo则连接到Arduino UNO的第8针 。
伺服电机连线介绍 :
1. 伺服电机用于旋转超声波传感器以扫描障碍物 。 它具有三个引脚 , 分别是控制 , VCC和GND 。
2. 伺服控制引脚连接到Arduino的引脚11 ,
3. VCC和GND连接到+ 5V和GND 。
电机驱动器L293D连线介绍:
1. L293D是16引脚IC 。
2. 引脚8和16是电源引脚 , 引脚1和9是使能引脚 , 这些引脚连接到+ 5V 。
3. 引脚2和7是来自微控制器的第一电机控制输入 , 它们分别连接到Arduino的引脚6和7 。
4. 引脚10和15是来自微控制器的第二电机控制输入 , 它们连接到Arduino的引脚5和4 。
5. L293D的引脚4、5、12和13是接地引脚 , 并连接到Gnd 。
马达连线介绍:
1. 第一马达(将其视为左轮马达)跨接在L293D的引脚3和6上 。
2. 用作右轮马达的第二个马达连接到L293D的11和14针 。
如果上面的避障机器人电路图不清楚 , 以下图像可能会有所帮助 。
PS:
在进行项目之前 , 了解超声波传感器的工作原理非常重要 。 超声波传感器工作的基本原理:
1. ?使用外部触发信号 , 超声传感器上的Trig引脚被设置为逻辑高电平至少10μs 。 发送器模块发出声音突发 。 这由40KHz的8个脉冲组成 。
2. ?撞击表面后 , 信号返回 , 接收器检测到该信号 。 从发送信号到接收信号 , Echo引脚均处于高电平 。 可以使用适当的计算将该时间转换为距离 。
该项目的目的是使用超声波传感器和Arduino实现避障机器人 。 所有连接均按照电路图进行 。 下面说明该项目的工作原理:
1. 接通机器人电源后 , 机器人的两个电动机都将正常运行 , 并且机器人将向前移动 。 在这段时间内 , 超声波传感器会连续计算机器人与反射表面之间的距离 。
2. 此信息由Arduino处理 。 如果机器人与障碍物之间的距离小于15cm , 则机器人会停止并使用伺服电机和超声波传感器沿左右方向扫描新距离 。 如果向左侧的距离大于右侧的距离 , 则机器人将为左转做好准备 。 但是首先 , 它会稍微备份一下 , 然后以相反的方向激活左轮马达 。
3. 同样 , 如果右距离大于左距离 , 则机器人会准备右旋转 。 这个过程将永远持续下去 , 机器人将继续前进 , 不会碰到任何障碍 。
注意
- 由于该项目基于Arduino , 因此编程非常容易 , 并且可以轻松修改 。
- 不需要Arduino Motor Shield 。
- 使用9V电池时 , 至少需要两节这样的电池才能为机器人供电 。 最好使用2节9V电池(一个用于Arduino , 超声波传感器 , 伺服电动机 , 另一个用于L293D和电动机) 。
- 超声波传感器不应直接连接到电源 , 因为它可能会影响正常性能 。
- 代替超声波传感器 , 也可以使用IR发射器-接收器对 。
- 几乎所有的移动机器人导航系统都可以使用避免机器人的障碍 。
- 它们可用于家庭工作 , 例如自动吸尘 。
- 它们还可以用于危险环境中 , 否则可能会导致人身伤害 。
推荐阅读




















- 绝缘|掺杂Mott绝缘体的电子结构演变研究获进展
- 宅在家不如DIY街边的火爆小吃,干净卫生又好吃,过瘾!
- 血管|陆清声教授:血管腔内介入手术机器人的特点和未来发展方向
- 电子体温计|儿科医生妈妈:水银体温计和汞中毒——你所不知道的那些事儿
- 新疆广汇男篮|艾尔曼医疗电子赞助新疆广汇男篮 高科技设备助力运动康复
- 电子烟|肺癌患者难戒烟?这项研究发现了一个好办法
- 软体机器人|在海洋深深深处游泳的软体机器人
- 机器人|马斯克的星舰SN10爆炸,波动公司机器人成亮点,有何玄机?
- 软体机器人|国产软体机器人成功挑战水下10900米,无耐压外壳游最深海沟
- 电子血压计|电子血压计与水银血压计,该怎么选?测左手还是右手?