环球网:受蛇启发 科学家研发出能滑行并越过障碍物的机器人
据外媒New Atlas报道 , 约翰·霍普金斯大学的工程师们研究了蛇如何四处滑行 , 从而为灵活的新型机器人的设计提供了信息 。 研究人员希望这一进展可以导致搜索和救援机器人能够轻松解决各种障碍 。
文章图片
研究的资深作者陈力(音译)表示:“我们从这些令人毛骨悚然的生物获得灵感 , 因为它们已经非常擅长稳定地解决日常生活中的障碍 。 我们希望我们的机器人能够学习如何像蛇一样在表面快速摆动推进身体前行 。 ”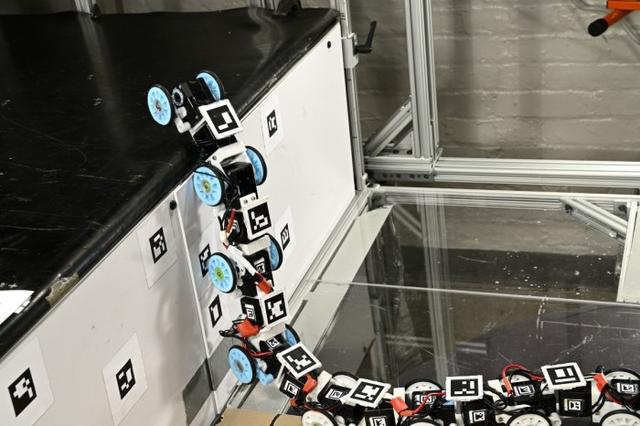
文章图片
研究人员观察到王蛇如何爬上不同高度的台阶和不同表面 。 当面对台阶时 , 这爬行动物似乎将其身体运动分成三部分-前后都来回移动 , 而中间部分则保持僵硬 。 接近台阶时 , 前段的长度将增加 , 中间段的长度将保持不变 , 而后段的长度将缩短 。 对于较高的台阶或那些具有光滑表面的台阶 , 速度将降低 , 并且摆动不那么明显 , 以帮助保持稳定性 。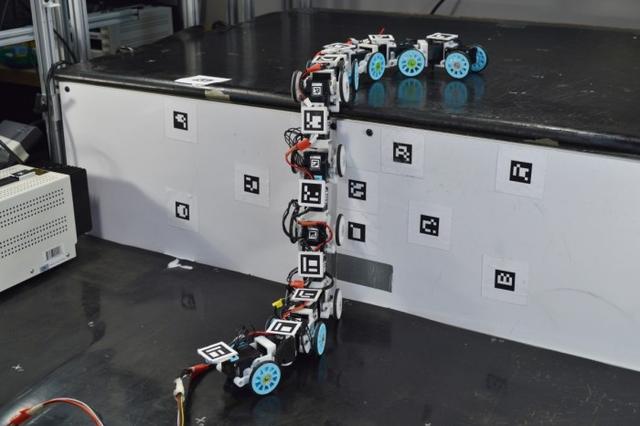
文章图片
在查看了蛇的视频之后 , 研究生傅启元(音译)开始着手建造蛇形机器人 。 十段轮式履带车的早期版本在遇到台阶时经常遇到稳定性问题 , 经常翻倒或卡住 。 工程师通过在每个单向轮与车身各部分之间插入一个悬架机构来降低其侧倾不稳定性 。 如今 , 这种蛇形机器人能够在攀爬时将自己推向地面 , 几乎可以爬上“高度是其身体长度38%的”台阶 。
文章图片
研究小组指出 , 机器人前行的速度几乎与蛇的速度不相上下 。 但是 , 悬架的增加确实意味着它需要比其他研究中的早期机器人更多的动力来运行 。 工程师将继续研究蛇形机器人 , 以使其能够在3D地形上承受更复杂的障碍 。
关于该项目的论文已发表在《Experimental Biology》和《Royal Society Open Science》杂志上 。
【环球网:受蛇启发 科学家研发出能滑行并越过障碍物的机器人】责编:陶宗瑶
推荐阅读
















- 看完阿里纪录片《扬子江大鳄》心中有何启发
- 环球网|七彩云南本命福佑系列全新升级亮相2020中国国际珠宝展
- 星岛网|
- 环球网社会|珠海斗门现无人驾驶小车!车主楼下买包烟,眼睁睁看爱车冲进大坑!
- 你看过的对自己最有启发的英雄联盟视频是哪个
- HTC Sense的成功(如花哨配色)对我们有啥启发
- 怎样判断一个蜘蛛纸牌是否可解
- 环球网汽车|马自达个性小众车型MX-30正式发布
- 环球网国际|花式护车!土耳其车主用毯子棉被纸板箱盖车防冰雹
- 环球网|苏宁十一数据显示国人更爱美 海蓝之谜销量翻倍