дёҠжө·еёӮ|з ”з©¶дәәе‘ҳдҪҝз”Ё3Dжү“еҚ°еҲӣе»әд»ҝз”ҹжңәеҷЁдәәжүӢжҢҮпјҒеҸҜз”ЁдәҺз ”з©¶жңәеҷЁдәәзі»з»ҹ
гҖҗдёҠжө·еёӮ|з ”з©¶дәәе‘ҳдҪҝз”Ё3Dжү“еҚ°еҲӣе»әд»ҝз”ҹжңәеҷЁдәәжүӢжҢҮпјҒеҸҜз”ЁдәҺз ”з©¶жңәеҷЁдәәзі»з»ҹгҖ‘
ж–Үз« еӣҫзүҮ
ж–Үз« еӣҫзүҮ
гҖҗжһҒжһңж’ӯжҠҘгҖ‘жҚ®еӨ–еӘ’жҠҘйҒ“ пјҢ еҠ еҲ©зҰҸе°јдәҡеӨ§еӯҰеңЈе…ӢйІҒж–ҜеҲҶж Ўе’Ңж—Ҙжң¬з«Ӣе‘ҪйҰҶеӨ§еӯҰзҡ„з ”з©¶дәәе‘ҳжңҖиҝ‘и®ҫ计并еҲ¶йҖ дәҶеҸ—дәәдҪ“йӘЁйӘјз»“жһ„еҗҜеҸ‘зҡ„жңәеҷЁдәәжүӢжҢҮ пјҢ 并еңЁд»Ҡе№ҙзҡ„жңәеҷЁдәәе’ҢзҺҜеўғжҷәиғҪеӣҪйҷ…дјҡи®®пјҲURAIпјүдёҠеұ•зӨәзҡ„дәҶд»ҝз”ҹжңәжў°жүӢжҢҮжҳҜдҪҝз”ЁеӨҡжқҗж–ҷ3Dжү“еҚ°жңәз»„иЈ…иҖҢжҲҗзҡ„ гҖӮ
дәәзұ»еӨ©з”ҹе°ұеҸҜд»ҘйҖҡиҝҮе…іиҠӮзҡ„йӘЁйӘјеҶ…з»“жһ„иҝӣиЎҢеӨҚжқӮзҡ„иҝҗеҠЁ пјҢ йҹ§еёҰе’ҢиӮҢи…ұеј№жҖ§ең°иҝһжҺҘдҪҝдәәзұ»иҝҗеҠЁжҲҗдёәеҸҜиғҪ гҖӮ дёҚиҝҮеңЁз§‘еӯҰйўҶеҹҹе°Ҷеј№жҖ§е’Ңйқһеј№жҖ§жқҗж–ҷз»“еҗҲиө·жқҘе°Ҷи§ЈеҶіжңәеҷЁдәәжҠҖжңҜдёӯиҝҳжҳҜдёҖдёӘжҷ®йҒҚз©әзҷҪ пјҢ еӣ дёәжҹ”жҖ§зі»з»ҹеҸҜиғҪеҫҲйҡҫеӨ„зҗҶйҮҚзү© пјҢ иҖҢеҲҡжҖ§е№іеҸ°еҸҜиғҪйңҖиҰҒеӨҚжқӮзҡ„еҲ¶йҖ жҲ–жҺ§еҲ¶жүҚиғҪиҺ·еҫ—дёҺдәәжүӢзӣёеҪ“зҡ„зҒөжҙ»жҖ§ гҖӮ
жңҖиҝ‘ пјҢ еҠ еҲ©зҰҸе°јдәҡеӨ§еӯҰеңЈе…ӢйІҒж–ҜеҲҶж Ўе’Ңж—Ҙжң¬з«Ӣе‘ҪйҰҶеӨ§еӯҰзҡ„зҡ„科еӯҰ家们е·ҘдҪңзҡ„дё»иҰҒзӣ®зҡ„жҳҜеҲӣйҖ еҸ—иҮӘ然系з»ҹеҗҜеҸ‘зҡ„жңәеҷЁдәәжүӢ пјҢ дҪҶжҳҜз ”з©¶дәәе‘ҳеёҢжңӣе°Ҷ他们зҡ„еӨ§йғЁеҲҶзІҫеҠӣйӣҶдёӯеңЁи®ҫи®ЎдәәйҖ жүӢдёҠ пјҢ иҖҢдёҚжҳҜеңЁеҲ¶йҖ е’Ңз»„иЈ…дёҠ гҖӮ
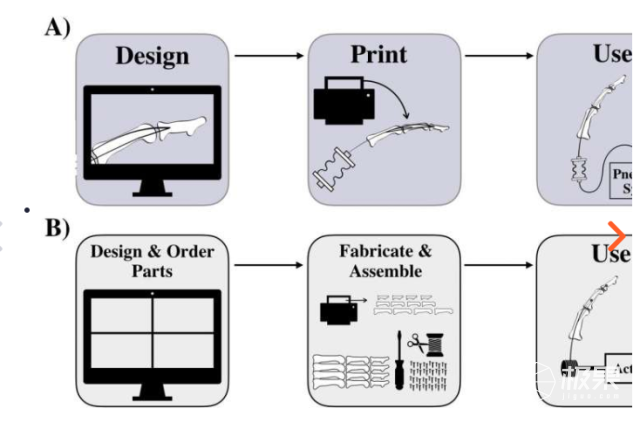
еӣ жӯӨ пјҢ 他们еҶіе®ҡйҮҮз”ЁжңҖе…Ҳиҝӣзҡ„3Dжү“еҚ°ж–№жі• пјҢ иҜҘж–№жі•еҸҜд»Ҙз®ҖеҢ–并еҠ йҖҹж•ҙдёӘеҺҹеһӢз”ҹдә§иҝҮзЁӢ гҖӮ
еңЁи®ҫи®ЎиҝҮзЁӢдёӯеҲ©з”ЁеӨҡз§Қжқҗж–ҷзҡ„3Dжү“еҚ°дҪҝ科еӯҰ家еҸҜд»ҘиҮӘз”ұи®ҫи®Ў3DиӮҢи…ұе’Ңйҹ§еёҰз»“жһ„ пјҢ еҗҢж—¶иҝҳе…Ғи®ёеңЁеҚ•еј жү“еҚ°дёӯеҲӣе»әз”өзјҶй©ұеҠЁзҡ„жңәеҷЁдәә пјҢ зІҳеј№жҖ§еҚ°еҲ·жқҗж–ҷдёәжңәжў°жҸҗдҫӣдәҶзҒөжҙ»жҖ§ гҖӮ
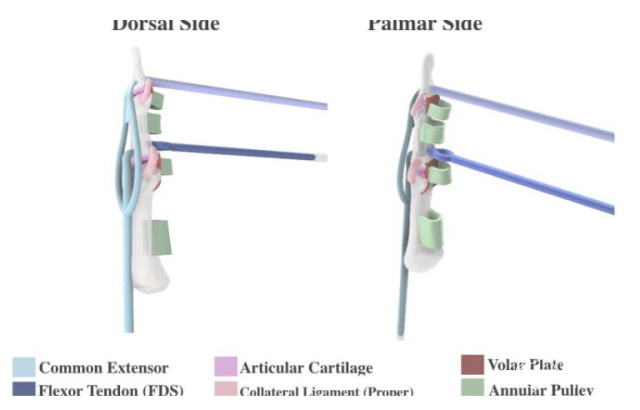
з ”з©¶дәәе‘ҳи®ҫи®Ўзҡ„жңәеҷЁдәәжүӢжҢҮе…·жңүзұ»дјјдәҺдәәзұ»зҡ„йӘЁйӘјеҮ дҪ•еҪўзҠ¶гҖҒйҹ§еёҰз»“жһ„гҖҒдәәйҖ иӮҢиӮүе’ҢзІҳеј№жҖ§и…ұ гҖӮ дҪҝз”ЁеӨҡжқҗж–ҷ3Dжү“еҚ°жңәе°ҶжүҖжңүиҝҷдәӣ组件еҗҲжҲҗдёәеҚ•дёӘйӣ¶д»¶ гҖӮ
йҷӨжӯӨд№ӢеӨ– пјҢ 科еӯҰ家们иҝҳдҪҝз”Ёз§°дёәMuJoCoзҡ„жөҒиЎҢзү©зҗҶд»ҝзңҹеј•ж“ҺејҖеҸ‘дәҶжүӢжҢҮжЁЎеһӢ гҖӮ иҝҷж ·дёҖжқҘ пјҢ 他们е°ұеҸҜд»Ҙе°ҶжңәеҷЁдәәжүӢжҢҮеңЁжЁЎжӢҹдёӯжүҖиҺ·еҫ—зҡ„з»“жһңдёҺзҺ°е®һзҺҜеўғдёӯжүӢжҢҮзҡ„еҚ°еҲ·еҺҹеһӢжүҖиҺ·еҫ—зҡ„з»“жһңиҝӣиЎҢжҜ”иҫғ гҖӮ
з ”з©¶дәәе‘ҳеңЁе®һйӘҢдёӯиҺ·еҫ—зҡ„з»“жһңжҳҫзӨәдәҶе°Ҷ3Dжү“еҚ°е’ҢжЁЎжӢҹжҠҖжңҜзӣёз»“еҗҲд»ҘеҲӣе»әеӨҚжқӮзҡ„жңәеҷЁдәәзі»з»ҹ并иҺ·еҫ—еҜ№иҝҷдәӣзі»з»ҹзҡ„жӣҙеҘҪжҺ§еҲ¶зҡ„е·ЁеӨ§жҪңеҠӣ гҖӮ иҝҷдәӣз§‘з ”дәәе‘ҳжңҖз»ҲдҪҝз”Ёзҡ„ж–№жі•дҪҝ他们иғҪеӨҹе°ҶиҪҜжңәеҷЁдәәжҠҖжңҜдёӯжҷ®йҒҚдҪҝз”Ёзҡ„зІҳеј№жҖ§жқҗж–ҷдёҺжӣҙдј з»ҹзҡ„жңәеҷЁдәәжҠҖжңҜзӣёз»“еҗҲ пјҢ д»ҺиҖҢдҪҝдәәзұ»йӘЁйӘјеҶ…з»“жһ„зҡ„еӨҚеҲ¶жӣҙдёәзҙ§еҜҶ гҖӮ
жҲӘжӯўеҲ°зӣ®еүҚ пјҢ 他们иҝҳеңЁеҠӘеҠӣе°ҶиҜҘи®ҫи®Ўжү©еұ•еҲ°ж•ҙдёӘжүӢе’ҢжүӢи…• пјҢ д»Ҙе®һзҺ°еҜ№иұЎж“Қзәө пјҢ дёҚиҝҮзҰ»е®һзҺ°иҝҳе·®дёҖж®өи·қзҰ» пјҢ еҜ№жӯӨдҪ жңүдҪ•ж„ҹжғіпјҹ
жҺЁиҚҗйҳ…иҜ»














- иҸңзұҪйҘј|иҸңзұҪйҘјиў«иӘүдёәжһңеӣӯд№Ӣе®қпјҢдҪҶз”Ёй”ҷдәҶзғ§иӢ—зғ§ж №пјҢжһңеҶңеҰӮдҪ•жқҘдҪҝз”Ёпјҹ
- ж•ҷдҪ иҮӘеҲ¶е№ҝејҸжңҲйҘј
- ж–°еҶ з–«иӢ—|еҘҪж¶ҲжҒҜпјҒжҲ‘еӣҪеҸҲдёҖдёӘж–°еҶ з–«иӢ—иҺ·жү№зҙ§жҖҘдҪҝз”Ё
- з–«иӢ—|е…ЁзҗғжҠ—з–«еҸҲж·»вҖңж–°еҲ©еҷЁвҖқпјҒе®үеҫҪйҮҚз»„ж–°еһӢж–°еҶ з–«иӢ—иҺ·жү№зҙ§жҖҘдҪҝз”Ё
- зҫҠиӮү|315жӣқе…үе…»зҫҠеҒ·еҒ·дҪҝз”ЁвҖңзҳҰиӮүзІҫвҖқпјҢд»Җд№Ҳж ·зҡ„зҫҠиӮүеҸҜд»Ҙж”ҫеҝғеҗғпјҹ
- дҪҝз”Ёеҫ®жіўзӮү蒸蔬иҸңпјҢиҰҒжғіеҘҪеҗғиҗҘе…»дёҚжөҒеӨұпјҢдёҚеҗҢзҡ„蔬иҸңж–№жі•дёҚеҗҢ
- з–«иӢ—|й«ҳзҰҸзӯүдәәз ”еҸ‘зҡ„ж–°еҶ йҮҚз»„дәҡеҚ•дҪҚиӣӢзҷҪз–«иӢ—еңЁеӣҪеҶ…иҺ·жү№зҙ§жҖҘдҪҝз”Ё
- иҡқжІ№жҖҺд№Ҳз”Ёпјҹе®ғжңүиҝҷдәӣдҪҝз”ЁжҠҖе·§пјҢжҺҢжҸЎдәҶиҝҷдәӣжҠҖе·§пјҢзӮ’иҸңйӮЈеҸ«дёҖдёӘйІң
- ж–°еҶ иӮәзӮҺ|дёӯ科йҷўеӣўйҳҹз ”еҸ‘ж–°еҶ иӮәзӮҺжҠ—дҪ“иҚҜзү©иҺ·жү№ж¬§зӣҹеҶ…зҙ§жҖҘдҪҝз”Ё
- иҡқжІ№дёҚиғҪйҡҸдҫҝз”ЁпјҢд»ҘдёӢ4дёӘдҪҝз”ЁвҖңиҜҜеҢәвҖқиҰҒйҒҝејҖпјҢе°Өе…¶жҳҜ第3дёӘпјҒ