|感知机实现非线性分类
文章图片
文章图片
文章图片

文章图片

文章图片
感知机实现非线性分类
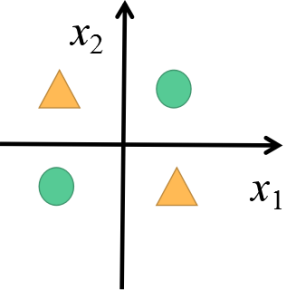
在上回故事中 , 我们谈到了由单个神经元所构成的感知机无法处理非线性分类问题 。 如图1所示 。
图1 非线性分类数据
对于单个神经元(两输入 , 单输出)所构成的感知机 , 其分类边界为:w1x1+w2x2+b=0 , 从其分类边界也可以发现 , 它只能处理线性可分的数据 。
那么 , 当遇到如图1所示的线性不可分数据应该怎么办呢?
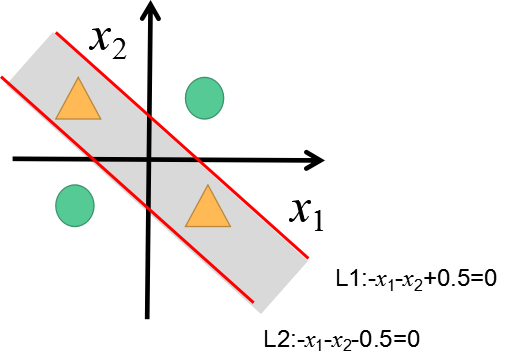
在上一回中 , 我们提到了可以通过构建类似图2的分类边界来实现非线性数据的分类 。 那么 , 我们应该如何来设计我们的神经元结构呢?
图2 非线性数据分类
首先 , 我们可以发现 , 图2所示的边界由两条直线组成 , 且对于图2所示的数据 , 输入维度为2 , 输出维度为1 。 在这里 , 我们假设黄色的三角形为第0类数据 , 绿色的圆形为第1类数据 。 因此 , 我们可以确定我们的神经元结构输入维度为2 , 输出维度为1 。 最终设计的感知机结构如图3所示 。 在图3所示的结构中 , 该结构接受两个输入 , 一个输出 , 在第一层的结构中 , 我们设计了两个神经元 , 希望这两个神经元能够分别模拟两个直线分类边界 , 因为我们最终的输出为一个维度 , 所以在第一层神经元的基础上再添加了一个神经元 , 该神经元的作用就是将1号及2号神经元的输出进行联合 , 即实现图2中的阴影部分的功能 。
图3 感知机实现非线性分类
为简单起见 , 在这里 , 我们假设已知这两条直线的方程 , 如图4所示 。
图4 边界方程
根据L1与L2 , 可将图3中感知机的1号神经元与2号神经元权重及偏置项分配为:
图5 1号与2号神经元的权重及偏置项分配
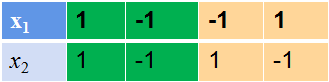
接下来 , 让我们看看 , 对于图2中所示数据 , 1号与2号神经元的输出经过激活函数(这里激活函数选择与之前章节一致)后的输出:
图6 1号与2号神经元输出 , 及其经过激活函数后的输出
图6中 , 括号外的数据为神经元输出 , 括号内的数据为神经元输出经过激活函数后的输出 , 现在 , 我们将图6画出来 , 如图7所示:
图7 神经元输出经过激活函数后的输出可视化结果
如图7所示 , 我们的输入在经过1号神经元与2号神经元后的输出映射为了线性可分的数据 , 我们可以寻找到如图7中L3所示的边界将这两类输出数据区分开 , 即我们可以将3号神经元权重及偏执设置为:
图7 3号神经元权重及偏置项设置
现在让我们来检测下图7所示的多个神经元构成的感知机结构是否能够将图2所示的数据区分开 , 如图8所示:
图8 神经网络功能验证
如图8中3号神经元的输出经过激活函数映射后的输出所示 , 对于图1中所示的数据 , 该结构可以将其完美地区分开 。
【|感知机实现非线性分类】最后 , 总结一下 , 我们在该结构设计过程中 , 对于1号及2号神经元 , 其实是我们从自己的视角出发 , 已经假定了L1与L2已知 , 在这个基础上才有L3的设计过程 。 但实际情况下 , 我们是不知道L1与L2的?这种情况下 , 我们又应该如何求取L1与L2呢?欲知后事如何 , 请听下回分解!
推荐阅读















- 新华网|济南实现新建商品房“交房即办证”
- 京雄城际年底贯通|京雄城际年底贯通,北京市至雄安新区可实现1小时通达
- 中年|Angular export class AppComponent里定义变量的实现原理
- 无人机|打造“5G智慧之城” 深圳实现5G独立组网全覆盖
- 男孩雨中跳芭蕾,获数百万网友点赞:有梦就去追,万一实现了呢
- 中新经纬|重要拐点!7月生猪存栏首次实现同比增长
- 女强人俱乐部|男孩雨中跳芭蕾,获数百万网友点赞:有梦就去追,万一实现了呢
- 全球第一城!深圳实现5G独立组网全覆盖
- 引乐科技|花9999元就能实现“开豪车”的梦想,你不想要吗?
- |湖北五峰:实现大学生村医全覆盖(组图)