гҖҺзҺҜзҗғзҪ‘гҖҸжң¬В·еҸӨйҮҢе®үеӨ§еӯҰеӣўйҳҹејҖеҸ‘еҮәзҒөжҙ»зҡ„RCTRеұҘеёҰжңәеҷЁдәә
еңЁжңәеҷЁдәәйўҶеҹҹ пјҢ еёёи§Ғзҡ„жңүиҪ®ејҸгҖҒиҪЁйҒ“е’Ңз«ҷз«ӢејҸзӯүдёҚе°ҪзӣёеҗҢзҡ„и®ҫи®Ўж–№жЎҲ гҖӮ дёҚиҝҮжң¬ж–ҮиҰҒдёәеӨ§е®¶д»Ӣз»Қзҡ„ пјҢ еҲҷжҳҜжқҘиҮӘд»ҘиүІеҲ—жң¬В·еҸӨйҮҢе®үеӨ§еӯҰзҡ„еҸҜйҮҚжһ„иҝһз»ӯиҪЁйҒ“жңәеҷЁдәә пјҢ з®Җз§°RCTRгҖӮ з”ұDavid ZarroukеёҰйўҶзҡ„з”ҹзү©еҗҜеҸ‘е’ҢеҢ»з–—жңәеҷЁдәәе®һйӘҢе®Өеӣўйҳҹ пјҢ иҝҮеҺ»жӣҫеҸӮдёҺиҝҮи®ёеӨҡж–°йў–зҡ„жңәжў°и®ҫи®Ў пјҢ жҜ”еҰӮйҖҡиҝҮжіўеҠЁжқҘзҲ¬иЎҢгҖҒжёёжіігҖҒз”ҡиҮідёҖеҸ°еҸҜйЈһеҸҜиө°зҡ„ж— дәәжңә гҖӮ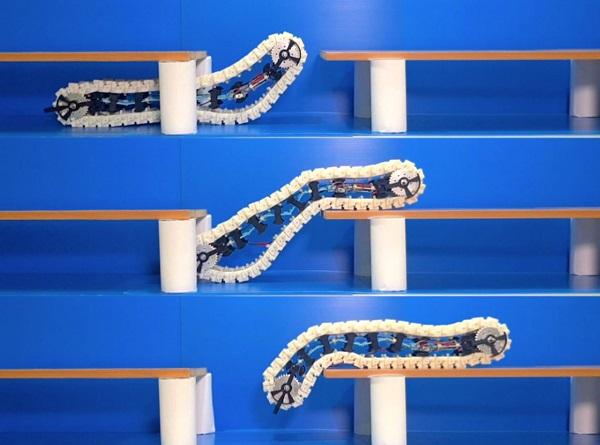
ж–Үз« еӣҫзүҮ
пјҲйўҳеӣҫ viaNew Atlasпјү
ZarroukеӣўйҳҹеҶіе®ҡе°ҶRCTRиҝӣдёҖжӯҘе°ҸеһӢеҢ– пјҢ еҪ“еүҚеҺҹеһӢдёӯдҪҝз”ЁдәҶдёүеҸ°з”өжңә пјҢ дҪҶжңӘжқҘжңүжңӣзІҫз®ҖиҮідёӨеҸ°з”өжңә гҖӮ
йҡҸзқҖжңәеҷЁдәәзҡ„еүҚиҝӣ пјҢ жҹ”жҖ§иҝһжқҶиғҪеӨҹи®©жңәеҷЁдәәзҡ„еҲҡжҖ§еұҘеёҰдҝқжҢҒдёҖе®ҡзҡ„еҪўзҠ¶гҖҒжҲ–иҖ…и§Јй”ҒжӣҙеӨ§зҡ„зҒөжҙ»жҖ§ гҖӮ жҜ”еҰӮеңЁйҒҮеҲ°йҡңзўҚзү©зҡ„ж—¶еҖҷ пјҢ еҸҜд»Ҙи®©еүҚеӨҙд»Ҙзү№е®ҡи§’еәҰж”ҖзҲ¬иҝҮеҺ» гҖӮ
еҰӮи§Ҷйў‘жүҖзӨә пјҢ йҖҡиҝҮе°Ҷй”Ғе®ҡе’ҢжңӘй”Ғе®ҡзҡ„иҝһжқҶж··жҗӯеҲ°дёҖиө· пјҢ еҸҜзЎ®дҝқRCTRжңәеҷЁдәәзҡ„иә«дҪ“еңЁдёҚе№іеқҰзҡ„ең°еҪўдёҠж»ҡеҠЁе№¶еҗ‘дёҠејҜжӣІ гҖӮ
жҳҫ然 пјҢ иҝҷз§ҚжңәеҷЁдәәеҸҜеңЁжҗңзҙўе’Ңж•‘жҸҙдёҠеҸ‘жҢҘжһҒеӨ§зҡ„дҪңз”Ё гҖӮ жҜ”еҰӮеңЁзҒҫйҡҫжҲ–еӢҳжөӢзҺ°еңә пјҢ RCTRиғҪеӨҹиҪ»жқҫйҖҡиҝҮдј з»ҹеұҘеёҰжңәеҷЁдәәйҡҫд»ҘйҖҫи¶Ҡзҡ„еқ‘жҙји·Ҝзәҝ гҖӮ
ж–Үз« еӣҫзүҮ
йҒ—жҶҫзҡ„жҳҜ пјҢ еҪ“еүҚеҺҹеһӢеҸӘиғҪжІҝзқҖзӣҙзәҝ移еҠЁ гҖӮ еӣ жӯӨеңЁжҠ•е…Ҙе®һйҷ…еә”з”Ёд№ӢеүҚ пјҢ жң¬В·еҸӨйҮҢе®үеӨ§еӯҰзҡ„з ”з©¶еӣўйҳҹд»ҚйңҖжүҫеҲ°е…¶е®ғж–№жі• пјҢ д»ҘжҸҗеҚҮRCTRжңәеҷЁдәәзҡ„ж“ҚжҺ§зҒөжҙ»жҖ§ гҖӮ
гҖҗгҖҺзҺҜзҗғзҪ‘гҖҸжң¬В·еҸӨйҮҢе®үеӨ§еӯҰеӣўйҳҹејҖеҸ‘еҮәзҒөжҙ»зҡ„RCTRеұҘеёҰжңәеҷЁдәәгҖ‘иҙЈзј–пјҡйҷ¶е®—瑶
жҺЁиҚҗйҳ…иҜ»















- еӣӣе·қе®үе·һпјҡ4еҗҚеӨ§еӯҰз”ҹиў«еӣ°йӣӘеұұжӮ¬еҙ–иӯҰж–№иҝһеӨңжҲҗеҠҹж•‘жҸҙ
- е’Ңе№ів– жҳӯжҳӯеүҚдәӢгҖҒжғ•жғ•еҗҺдәәпјҒеҚ—иҙўеӨ§еӯҰеӯҗй“ӯи®°еҺҶеҸІгҖҒзҘҲж„ҝе’Ңе№іпјҒ
- еҚҲйӨҗв– е°ҸвҖңиҶівҖқеӨ§зҲұпјҢиҝҷеңәеӨ§еӯҰж…Ҳе–„ж‘„еҪұеұ•дёәеҚғдҪҷеҗҚеұұеҢәе„ҝз«ҘжҸҗдҫӣе…Қиҙ№еҚҲйӨҗ
- з”Ёз”ҹзү©жҠҖжңҜжҺ’ең°йӣ·дёңеҢ—жһ—дёҡеӨ§еӯҰеӯҰеӯҗж–©иҺ·еӣҪйҷ…йҮ‘еҘ–
- жұҹиӢҸзңҒ第еҚҒдә”еұҠеӨ§еӯҰз”ҹиҒҢдёҡ规еҲ’еӨ§иөӣжҖ»еҶіиөӣеңЁеёёе·һдёҫеҠһ
- е°ұдёҡ|жңүж ЎеҗҚиҙўпјҡжұҹиҘҝиҙўз»ҸеӨ§еӯҰиөЈжұҹзў§ж°ҙ
- еӨ§еӯҰеҶҚжңүдёүдёӘжңҲе°ұз»“жқҹдәҶпјҢжІЎеӯҰеҲ°зҹҘиҜҶпјҢеҸӮеҠ дёҖдёӘиҪҜ件жөӢиҜ•еҹ№и®ӯжңәжһ„еҘҪеҗ—
- еҚ—йҖҡеӨ§еӯҰ|еҲӣдёҡйЎ№зӣ®иҒҡз„ҰдәҢеӯ©е®¶еәӯпјҢеҚ—йҖҡеӨ§еӯҰе–ңиҺ·еӣҪиөӣйҮ‘еҘ–
- жҺ’еҗҚ|еҢ—дә¬еӨ§еӯҰжҺүеҮәеүҚ3пјҢеҢ—еёҲеӨ§вҖңжқҖиҝӣвҖқеүҚеҚҒ2021дёӯеӣҪеҶ…ең°еӨ§еӯҰжҺ’еҗҚ
- еӨ§еӯҰ|дёҠжө·еӨ§еӯҰ第8пјҢеүҚ10еҗҚжңүе“Әдәӣй«ҳж ЎпјҹдёҠжө·еёӮ30жүҖеӨ§еӯҰжҺ’еҗҚ