зұ»вҖ”иҒҢиҙЈвҖ”еҚҸдҪңиҖ…е»әжЁЎ
зұ»вҖ“иҒҢиҙЈ-еҚҸдҪңиҖ…пјҲClass-Responsibility-Collaborator пјҢ CRCпјүе»әжЁЎжҸҗдҫӣдәҶдёҖдёӘз®ҖеҚ•ж–№жі• пјҢ еҸҜд»ҘиҜҶеҲ«е’Ңз»„з»ҮдёҺзі»з»ҹжҲ–дә§е“ҒйңҖжұӮзӣёе…ізҡ„зұ» гҖӮ Amblerз”ЁеҰӮдёӢж–Үеӯ—и§ЈйҮҠдәҶCRCе»әжЁЎ:
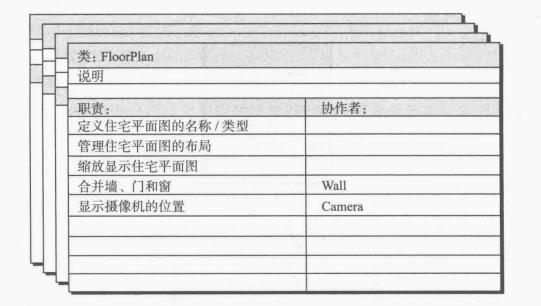
CRCжЁЎеһӢе®һйҷ…дёҠжҳҜиЎЁзӨәзұ»зҡ„ж ҮеҮҶзҙўеј•еҚЎзүҮзҡ„йӣҶеҗҲ гҖӮ иҝҷдәӣеҚЎзүҮеҲҶдёүйғЁеҲҶ пјҢ йЎ¶йғЁеҶҷзұ»еҗҚ пјҢ еҚЎзүҮдё»дҪ“е·Ұдҫ§йғЁеҲҶеҲ—еҮәзұ»зҡ„иҒҢиҙЈ пјҢ еҸідҫ§йғЁеҲҶеҲ—еҮәзұ»зҡ„еҚҸдҪңиҖ… гҖӮ
дәӢе®һдёҠ пјҢ CRCжЁЎеһӢеҸҜд»ҘдҪҝз”Ёзңҹе®һзҡ„жҲ–иҷҡжӢҹзҡ„зҙўеј•еҚЎ пјҢ ж„ҸеӣҫжҳҜжңүз»„з»Үең°иЎЁзӨәзұ» гҖӮ иҒҢиҙЈжҳҜе’Ңзұ»зӣёе…ізҡ„еұһжҖ§е’Ңж“ҚдҪң гҖӮ з®ҖеҚ•ең°иҜҙ пјҢ иҒҢиҙЈе°ұжҳҜвҖңзұ»жүҖзҹҘйҒ“жҲ–иғҪеҒҡзҡ„д»»дҪ•дәӢвҖқ гҖӮ еҚҸдҪңиҖ…жҳҜжҸҗдҫӣе®ҢжҲҗжҹҗдёӘиҒҢиҙЈжүҖйңҖиҰҒдҝЎжҒҜзҡ„зұ» гҖӮ йҖҡеёё пјҢ еҚҸдҪңж„Ҹе‘ізқҖдҝЎжҒҜиҜ·жұӮжҲ–жҹҗдёӘеҠЁдҪңиҜ·жұӮ гҖӮ
FloorPlanзұ»зҡ„дёҖдёӘз®ҖеҚ•CRC зҙўеј•еҚЎеҰӮеӣҫжүҖзӨә гҖӮ CRC еҚЎдёҠжүҖеҲ—еҮәзҡ„иҒҢиҙЈеҸӘжҳҜеҲқжӯҘзҡ„ пјҢ еҸҜд»Ҙж·»еҠ жҲ–дҝ®ж”№ гҖӮ еңЁиҒҢиҙЈж ҸеҸіиҫ№зҡ„Wallе’ҢCameraжҳҜйңҖиҰҒеҚҸдҪңзҡ„зұ» гҖӮ
 ж–Үз« жҸ’еӣҫ
ж–Үз« жҸ’еӣҫ
CRCжЁЎеһӢзҙўеј•еҚЎ
зұ» гҖӮ зұ»зҡ„еҲҶзұ»еҸҜд»ҘйҖҡиҝҮеҰӮдёӢеҲҶзұ»ж–№ејҸиҝӣиЎҢжү©еұ•пјҡ
е®һдҪ“зұ» пјҢ д№ҹз§°дҪңжЁЎеһӢжҲ–дёҡеҠЎзұ» пјҢ жҳҜд»Һй—®йўҳиҜҙжҳҺдёӯзӣҙжҺҘжҸҗеҸ–еҮәжқҘзҡ„(дҫӢеҰӮFloorPlanе’Ң Sensor) гҖӮ иҝҷдәӣзұ»дёҖиҲ¬д»ЈиЎЁдҝқеӯҳеңЁж•°жҚ®еә“дёӯе’ҢиҙҜз©ҝеңЁеә”з”ЁзЁӢеәҸдёӯпјҲйҷӨйқһиў«жҳҺзЎ®еҲ йҷӨпјүзҡ„дәӢзү© гҖӮ
иҫ№з•Ңзұ»з”ЁдәҺеҲӣе»әз”ЁжҲ·еҸҜи§Ғзҡ„е’ҢеңЁдҪҝз”ЁиҪҜ件时дәӨдә’зҡ„жҺҘеҸЈпјҲеҰӮдәӨдә’еұҸ幕жҲ–жү“еҚ°зҡ„жҠҘиЎЁ) гҖӮ е®һдҪ“зұ»еҢ…еҗ«еҜ№з”ЁжҲ·жқҘиҜҙеҫҲйҮҚиҰҒзҡ„дҝЎжҒҜ пјҢ дҪҶжҳҜ并дёҚжҳҫзӨәиҝҷдәӣдҝЎжҒҜ гҖӮ иҫ№з•Ңзұ»зҡ„иҒҢиҙЈжҳҜз®ЎзҗҶе®һдҪ“еҜ№иұЎе‘ҲзҺ°з»ҷз”ЁжҲ·зҡ„ж–№
ејҸ гҖӮ дҫӢеҰӮ пјҢ Camera Windowзҡ„иҫ№з•Ңзұ»иҙҹиҙЈжҳҫзӨәSafeHomeзі»з»ҹзӣ‘и§Ҷж‘„еғҸжңәзҡ„иҫ“еҮә гҖӮ
жҺ§еҲ¶зұ»иҮӘе§ӢиҮіз»Ҳз®ЎзҗҶвҖңе·ҘдҪңеҚ•е…ғвҖқ гҖӮ д№ҹе°ұжҳҜиҜҙ пјҢ жҺ§еҲ¶зұ»еҸҜд»Ҙз®ЎзҗҶпјҡ(1пјүе®һдҪ“зұ»зҡ„еҲӣе»әжҲ–жӣҙж–°пјӣ(2пјүиҫ№з•Ңзұ»д»Һе®һдҪ“еҜ№иұЎиҺ·еҸ–дҝЎжҒҜеҗҺзҡ„е®һдҫӢеҢ–пјӣ(3пјүеҜ№иұЎйӣҶеҗҲй—ҙзҡ„еӨҚжқӮйҖҡдҝЎпјӣ(4пјүеҜ№иұЎй—ҙжҲ–з”ЁжҲ·е’Ңеә”з”Ёзі»з»ҹ
й—ҙдәӨжҚўж•°жҚ®зҡ„зЎ®и®Ө гҖӮ йҖҡеёё пјҢ зӣҙеҲ°и®ҫи®ЎејҖе§Ӣж—¶жүҚејҖе§ӢиҖғиҷ‘жҺ§еҲ¶зұ» гҖӮ
иҒҢиҙЈ гҖӮ жҲ‘们еңЁз»ҷзұ»еҲҶй…ҚиҒҢиҙЈж—¶еҸҜд»Ҙж №жҚ®д»ҘдёӢжҢҮеҜјеҺҹеҲҷпјҡ
1.жҷәиғҪзі»з»ҹеә”еҲҶеёғеңЁжүҖжңүзұ»дёӯд»ҘжұӮжңҖеӨ§зЁӢеәҰең°ж»Ўи¶ій—®йўҳзҡ„йңҖжұӮ гҖӮ жҜҸдёӘеә”з”Ёзі»з»ҹйғҪеҢ…еҗ«дёҖе®ҡзЁӢеәҰзҡ„жҷәиғҪ пјҢ д№ҹе°ұжҳҜзі»з»ҹжүҖзҹҘйҒ“зҡ„д»ҘеҸҠжүҖиғҪе®ҢжҲҗзҡ„ гҖӮ жҷәиғҪеңЁзұ»дёӯеҸҜд»ҘжңүеӨҡз§ҚеҲҶеёғж–№ејҸ гҖӮ е»әжЁЎж—¶еҸҜд»ҘжҠҠвҖңдёҚзҒөе·§вҖқ(Dumb)зұ»(еҮ д№ҺжІЎжңүиҒҢиҙЈзҡ„зұ»пјүдҪңдёәдёҖдәӣвҖңзҒөе·§вҖқзұ»(жңүеҫҲеӨҡиҒҢиҙЈзҡ„зұ»пјүзҡ„д»Һеұһ гҖӮ е°Ҫз®ЎиҜҘж–№жі•дҪҝеҫ—зі»з»ҹдёӯзҡ„жҺ§еҲ¶жөҒз®ҖеҚ•жҳ“жҮӮ пјҢ дҪҶеҗҢж—¶жңүеҰӮдёӢзјәзӮ№:жҠҠжүҖжңүзҡ„жҷәиғҪйӣҶдёӯеңЁе°‘ж•°зұ» пјҢ дҪҝеҫ—еҸҳжӣҙжӣҙдёәеӣ°йҡҫ;е°ҶдјҡйңҖиҰҒжӣҙеӨҡзҡ„зұ» пјҢ еӣ жӯӨйңҖиҰҒжӣҙеӨҡзҡ„ејҖеҸ‘е·ҘдҪң гҖӮ
еҰӮжһңжҷәиғҪзі»з»ҹжӣҙе№іеқҮең°еҲҶеёғеңЁеә”з”Ёзі»з»ҹзҡ„жүҖжңүзұ»дёӯ пјҢ жҜҸдёӘеҜ№иұЎеҸӘдәҶи§Је’Ңжү§иЎҢжҹҗдәӣдәӢжғ…пјҲйҖҡеёёжҳҜйҖӮеәҰйӣҶдёӯ) пјҢ 并жҸҗй«ҳзі»з»ҹзҡ„еҶ…иҒҡжҖ§ пјҢ иҝҷе°ҶжҸҗй«ҳиҪҜ件зҡ„еҸҜз»ҙжҠӨжҖ§е№¶еҮҸе°‘еҸҳжӣҙзҡ„еүҜдҪңз”Ё гҖӮ
дёәдәҶзЎ®е®ҡеҲҶеёғжҷәиғҪзі»з»ҹжҳҜеҗҰжҒ°еҪ“ пјҢ еә”иҜҘиҜ„дј°жҜҸдёӘCRCжЁЎеһӢзҙўеј•еҚЎдёҠж Үи®°зҡ„иҒҢиҙЈ пјҢ д»ҘзЎ®е®ҡжҹҗдёӘзұ»жҳҜеҗҰеә”иҜҘе…·жңүи¶…й•ҝзҡ„иҒҢиҙЈеҲ—иЎЁ гҖӮ еҰӮжһңжңүиҝҷз§Қжғ…еҶөе°ұиЎЁжҳҺжҷәиғҪеӨӘйӣҶдёӯ гҖӮ жӯӨеӨ– пјҢ жҜҸдёӘзұ»зҡ„иҒҢиҙЈеә”иЎЁзҺ°еңЁеҗҢдёҖжҠҪиұЎеұӮдёҠ гҖӮ дҫӢеҰӮеңЁиҒҡеҗҲзұ»CheckingAccountж“ҚдҪңеҲ—иЎЁдёӯ пјҢ иҜ„е®Ўдәәе‘ҳжіЁж„ҸеҲ°дёӨйЎ№иҒҢиҙЈ:иҙҰжҲ·дҪҷйўқе’Ңе·Із»“з®—зҡ„ж”ҜзҘЁ гҖӮ 第дёҖдёӘж“ҚдҪңзҡ„иҒҢиҙЈж„Ҹе‘ізқҖеӨҚжқӮзҡ„з®—жңҜе’ҢйҖ»иҫ‘иҝҮзЁӢ пјҢ 第дәҢдёӘж“ҚдҪңзҡ„иҒҢиҙЈжҳҜжҢҮз®ҖеҚ•зҡ„еҠһдәӢе‘ҳжҙ»еҠЁ гҖӮ 既然иҝҷдёӨдёӘж“ҚдҪңдёҚжҳҜзӣёеҗҢзҡ„жҠҪиұЎзә§еҲ« пјҢ еӣ жӯӨе·Із»“з®—зҡ„ж”ҜзҘЁеә”иҜҘиў«ж”ҫеңЁCheckEntryзҡ„иҒҢиҙЈдёӯ пјҢ иҝҷжҳҜз”ұиҒҡеҗҲзұ»CheckingAccountеҺӢзј©еҫ—еҲ°зҡ„дёҖдёӘзұ» гҖӮ
2.жҜҸдёӘиҒҢиҙЈзҡ„иҜҙжҳҺеә”е°ҪеҸҜиғҪе…·жңүжҷ®йҒҚжҖ§ гҖӮ иҝҷжқЎжҢҮеҜјеҺҹеҲҷж„Ҹе‘ізқҖеә”еңЁзұ»зҡ„еұӮзә§з»“жһ„зҡ„дёҠеұӮдҝқжҢҒиҒҢиҙЈпјҲеұһжҖ§е’Ңж“ҚдҪңпјүзҡ„йҖҡз”ЁжҖ§пјҲеӣ дёәе®ғ们жӣҙжңүдёҖиҲ¬жҖ§ пјҢ е°ҶйҖӮз”ЁдәҺжүҖжңүзҡ„еӯҗзұ») гҖӮ
3.дҝЎжҒҜе’ҢдёҺд№Ӣзӣёе…ізҡ„иЎҢдёәеә”ж”ҫеңЁеҗҢдёҖдёӘзұ»дёӯ гҖӮ иҝҷе®һзҺ°дәҶйқўеҗ‘еҜ№иұЎеҺҹеҲҷдёӯзҡ„е°ҒиЈ… пјҢ ж•°жҚ®е’Ңж“ҚдҪңж•°жҚ®зҡ„еӨ„зҗҶеә”еҢ…иЈ…еңЁдёҖдёӘеҶ…иҒҡеҚ•е…ғдёӯ гҖӮ
4.жҹҗдёӘдәӢзү©зҡ„дҝЎжҒҜеә”еұҖйҷҗдәҺдёҖдёӘзұ»дёӯиҖҢдёҚиҰҒеҲҶеёғеңЁеӨҡдёӘзұ»дёӯ гҖӮ йҖҡеёёеә”з”ұдёҖдёӘеҚ•зӢ¬зҡ„зұ»иҙҹиҙЈдҝқеӯҳе’Ңж“ҚдҪңжҹҗзү№е®ҡзұ»еһӢзҡ„дҝЎжҒҜ гҖӮ йҖҡеёёиҝҷдёӘиҒҢиҙЈдёҚеә”з”ұеӨҡдёӘзұ»еҲҶжӢ… гҖӮ еҰӮжһңдҝЎжҒҜжҳҜеҲҶеёғзҡ„ пјҢ иҪҜ件е°ҶеҸҳеҫ—жӣҙеҠ йҡҫд»Ҙз»ҙжҠӨ пјҢ жөӢиҜ•д№ҹдјҡйқўдёҙжӣҙеӨҡжҢ‘жҲҳ гҖӮ
жҺЁиҚҗйҳ…иҜ»



















- гҖҢж•°жҚ®жһ¶жһ„гҖҚTOGAFе»әжЁЎпјҡж•°жҚ®з”ҹе‘Ҫе‘Ёжңҹеӣҫ
- Matlab Simulink и®ҫи®ЎдёҺе»әжЁЎиҜҫзЁӢзӣҙж’ӯеүҚе…Қиҙ№иҜ•еҗ¬
- еҶ…е®№жҺЁиҚҗз®—жі•пјҡејӮжһ„иЎҢдёәеәҸеҲ—е»әжЁЎжҺўзҙў
- жҳҜж—¶еҖҷз”ЁBlenderе»әжЁЎдәҶпјҢдёҚзҹҘиҝҷеҮ дёӘзҗҶз”ұеӨҹдёҚеӨҹ
- еңЁе®¶е°ұиғҪ3DеӨҙзӣ”е»әжЁЎ HexrжҺЁеҮәе®ўеҲ¶еҢ–зЁӢеәҸ
- е…Ҙй—ЁеҲ°иҖҒжүӢе…ЁиҰҶзӣ–пјҢй”җйҫҷCPUз»ҷ3DеҲӣдҪңеҠ йҖҹ
- дҪҝз”ЁCatBoostе’ҢNODEе»әжЁЎиЎЁж јж•°жҚ®еҜ№жҜ”жөӢиҜ•
- гҖҢж•°жҚ®жһ¶жһ„гҖҚTOGAFе»әжЁЎпјҡжҰӮеҝөж•°жҚ®жЁЎеһӢеӣҫ
- зҲұдә‘иө„и®Ҝ|е…ЁиҮӘеҠЁе»әжЁЎгҖҒе…ЁиҮӘеҠЁз”ҹжҲҗ规еҲҷпјҢжҺўжҷәз«Ӣж–№пјҡдё“дёҡдәәе·ҘжҷәиғҪи§ЈеҶіж–№жЎҲжҸҗдҫӣе•Ҷ