|PDPS软件:工装夹具机械装置运动操作的创建方法
文章图片
文章图片
文章图片
概述一条完整的机器人生产线或一个完整的机器人工作站 , 不仅仅是由若干台机器人组成 , 还包含很多机器人外围设备 , 比如工装夹具、输送带、旋转台、行走轴、货架等 。
在虚拟仿真中 , 对于具备运动机构的机器人外围设备的运动操作仿真也是非常重要的 , 它是计算机器人工作站运行周期或生产线工艺节拍的关键环节 , 同时通过外围设备的运动仿真也可以进一步检查机器人的运行干涉情况 。
本期就来为大家介绍一下 , 机器人工装夹具运动操作的创建与仿真运行方法 。
复合操作创建由于本例中使用的工装夹具具备两种运动机构 , 一种是活动定位销的顶升运动机构 , 另一种是夹具的夹紧运动机构 。 为了能够更好的区分这两种运动机构的运动操作过程 , 可以先创建若干个“复合操作(Compound Operation)” , 并将其分别命名为B_Up、B_Down、A_Close、A_Open , 分别用于存放顶升运动机构上升操作、顶升运动机构下降操作、夹紧运动机构夹紧操作、夹紧运动机构松开操作 。
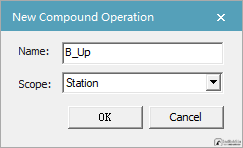
左侧操作浏览树Operation Tree中选择机器人工作站操作节点Station , 然后在Operation菜单栏下依次点击“New Operation”→“New Compound Operation” , 在弹出的New Compound Operation对话框的Name后输入“B_Up” , 点击OK按钮后即可在Station操作节点下创建B_Up复合操作 。
参考上述步骤 , 分别在机器人工作站操作节点下分别创建B_Down、A_Close、A_Open剩余的三个操作节点 。
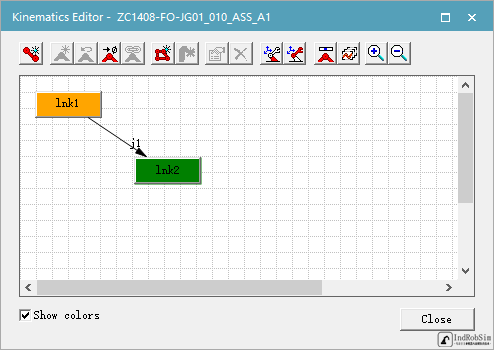
工装夹具运动操作创建在对机器人工装夹具运动操作创建之前 , 首先要定义工装夹具的运动机构 , 否则无法实现工装夹具运动操作 。
【|PDPS软件:工装夹具机械装置运动操作的创建方法】
左侧操作浏览树Operation Tree中选择创建好的机器人工装夹具顶升运动机构上升复合操作节点B_Up , 然后在Operation菜单栏下“New Operation”命令按钮的下拉菜单中 , 点击“New Device Operation”命令按钮 , 弹出New Device Operation对话框 , 在此对话框中可以创建工装夹具设备的运动操作 。
Name:设置设备操作名称 。 默认情况下 , 所有新设备操作均被命名为Op , 用户可以根据需要修改此名称 。
Device:设置要创建运动操作的设备运动机构 , 如工装夹具的夹紧运动机构 。 可以通过在软件工作区数模上选择 , 也可以通过在对象浏览树Object Tree中选择 。
Scope:点击“Scope”后的下拉列表 , 选择“操作节点”作为“设备运动机构操作”的父级操作节点 , 也可以通过点击操作浏览树Operation Tree中的操作节点实现 。 如果在使用“New Device Operation”命令之前选择了复合操作 , 则该复合操作将自动作为“Scope”插入 。
From pose:设备运动操作的起始运动状态 , 如工装夹具夹紧机构的松开状态Open 。
To pose:设备运动操作的最终运动状态 , 如工装夹具夹紧机构的夹紧状态Close 。
Description:设置设备运动操作的描述 , 它是一个可选项 。
Duration:设备运动机构运行持续时间 。 默认情况下 , 持续时间为5s 。
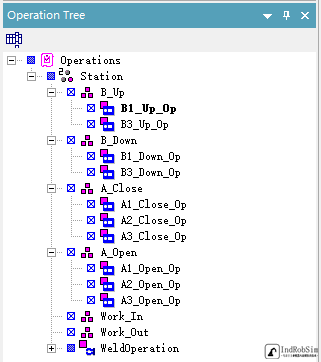
参考上述步骤 , 为机器人工装夹具其他运动机构分别创建运动操作 , 运行持续时间Duration均设定为2s , 全部创建完成后操作浏览树Operation Tree如下图所示 。
仿真运行工装夹具运动操作创建完成后 , 可以对其进行仿真运行 。
左侧操作浏览树Operation Tree中 , 点击要仿真运行的夹具运动操作 , 然后在Operation菜单栏下点击“Set Current Operation”命令按钮 , 即将选中的操作设定为当前操作 。
此时在软件下方的序列编辑器Sequence Editor中可以看到被激活的夹具运动操作 , 点击编辑器上方的“Play Simulation Forward”按钮启动机仿真运行 , 可以看到软件工作区中夹具数模相应的运动机构按照设定的操作过程进行运动 。
仿真运行结束后 , 点击编辑器上方的“Jump Simulation to Start”按钮 , 使工装夹具恢复原始状态 , 以便下一次仿真运行 。
参考上述步骤 , 可以对机器人工装夹具其他的运动操作进行仿真运行 。
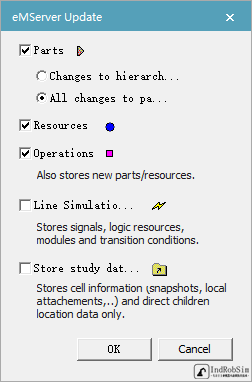
机器人工装夹具运动操作仿真运行确认无误后 , 点击上方的“Update eMServer”按钮 , 在弹出的对话框中点选“All changes to pa…” , 然后点击OK按钮 , 保存仿真项目进度 。
The End
推荐阅读















- 恶意软件|30000台苹果电脑遭恶意软件入侵,包括最新的M1系列
- 北大青鸟中博软件学院|程序员职业晋升规划,按照这规划,我年薪达到40万
- 代购|网络新诈骗“代购”骗子多,交友软件或社交平台上不都是朋友
- |Mino、TS的一些工装裤,是从这个「神秘的民间组织」入手的
- 中年|深不可测 工业软件之谜
- 前线风暴|美国批准向阿联酋出售F-35,MQ-9B等数千种武器,最引人注目的是F-35A的软件包
- 增长|金山软件第三季度营收环比下滑2%,净利润同比增长1749%
- 软件工程|自动实现开发测试运维 飞算全自动软件工程平台发布
- 金山软件|净利润同比增长1749% 金山软件新季报的表现到底如何
- 研发|河北五大工程促集成电路软件产业高质量发展