|ABB工业机器人快速转到位置点

文章图片
【|ABB工业机器人快速转到位置点】
文章图片
如果需要将ABB工业机器人移动到某个已知的位置点时 , 操作步骤一般是建立一个程序 , 然后在程序里面编写一条运动语句 , 然后运行该程序将机器人移动到已知的位置点(如下图);
将机器人移动到“p10”位置点;
在ABB机器人的操作中有一个方法可以将机器人快速移动到已知的位置点 , 操作方法如下:
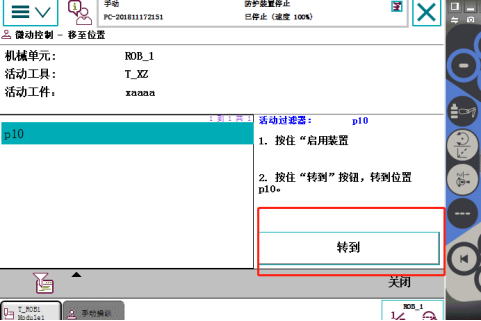
1) 将机器人示教器界面切换到手动操作界面 , 点击“转到...”;
2) 通过过滤按钮搜索到要移动到的位置点“p10”:
3)选中要移动的位置点“p10”一直按住“使能键” , 然
后一直点住“转到”按钮 , 机器人就可以运动到“p10”位置点 。
推荐阅读



![[千山万水难阻拦]生活就报以善果!早上好,愿你今天有个好心情!,你是善意的](https://imgcdn.toutiaoyule.com/20200421/20200421074810830907a_t.jpeg)











- 哈尔滨工业大学|2020“中国高等学校十大科技进展”揭晓!
- 血管|陆清声教授:血管腔内介入手术机器人的特点和未来发展方向
- 软体机器人|在海洋深深深处游泳的软体机器人
- 机器人|马斯克的星舰SN10爆炸,波动公司机器人成亮点,有何玄机?
- 软体机器人|国产软体机器人成功挑战水下10900米,无耐压外壳游最深海沟
- 软体机器人|《自然》发布中国科研团队成果:软体机器人潜入世界海洋最深处
- 软体机器人|中国团队完成软体机器人万米深海操控及自主游动实验
- 软体机器人|浙大软体机器人,为何能在万米深海运动自如?
- 西北工业大学|西北工大合作在纳米晶体管方面的最新研究进展
- 机器人|中国高校学者领衔研发新型磁性触觉皮肤,机器人可穿针引线夹鸡蛋