检测|华为挑战ICRA2020自动驾驶3D目标检测:刷新纪录、大比分夺冠( 二 )
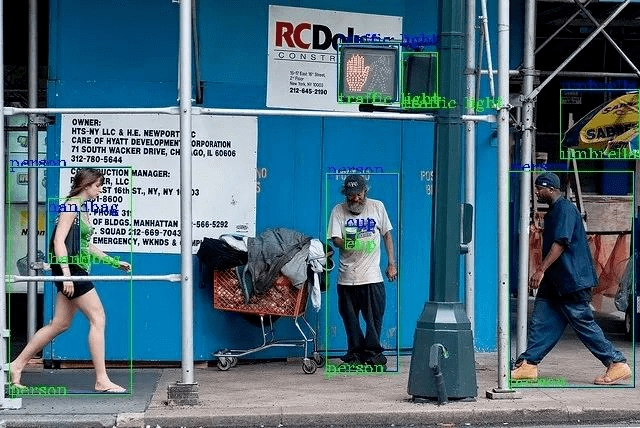
如下图所示 , 蓝色框是ground truth , 绿色的框是模型给出的检测结果 , 可以看到对于图中交通信号灯、较小的杯子以及受到遮挡的女式提包 , 模型都给出了优秀的表现 。
文章图片
最后介绍一下nuScenes参赛规则 , nuScenes预测任务的目标是预测nuScenes数据集中对象的未来轨迹 , 轨迹是xy位置的序列 , 对于此挑战 , 预测的时长为6秒 , 以2赫兹采样 。
nuScenes预测评估服务器全年开放 , 要参加挑战赛 , 参赛者需要在EvalAI上创建一个帐户 , 然后上传包含所有必需元数据的压缩结果文件 。
每次挑战后 , 结果将导出到上面显示的nuScenes 排行榜 , 这是根据测试数据集对方法进行基准测试的唯一方法 。
为了使用户能够针对社区对他们的方法的性能进行基准测试 , nuScenes全年举办一个排行榜 。
此外 , nuScenes打算在领先的计算机视觉和机器学习会议研讨会上组织一系列挑战 , 在挑战期间提交结果的用户有资格获得奖励 , 对于每个挑战 , 这些奖项可能会有所不同 。
据介绍 , 用户可以modes为每个代理提交多达25条提议的未来轨迹 , 称为 , 以及代理遵循该提议的概率 。
官方的指标将衡量此提议的轨迹与地面真相的匹配程度 , 最多可以使用两秒钟的历史记录来预测每个特工的未来轨迹 。
与以前的挑战不同 , 排行榜将根据nuScenes val集上的表现进行排名 , 这是因为nuScenes无法在测试集上发布注释 , 因此用户将无法在测试集上运行其模型 , 然后将其预测提交给服务器 。
为了防止在val集上过度拟合 , 将要求排行榜上的前5名提交者将其代码发送给我们 , 然后在测试集上运行其模型 。
每次挑战的提交都必须附有简短的技术报告(不超过1-2页) , 其中应详细描述该方法 , 以便进行独立验证 。
除此之外 , 参赛者必须提交一个json文件 , 其中包含Predictions每个代理的清单 , A Prediction具有以下组件:
nuScenes中的每个代理都由实例令牌和样本令牌索引 。
如前所述 , num_modes最多可以达到25 , 由于nuScenes在2 Hz下进行了6秒钟的预测 , 所以n_timesteps是12 。
nuScenes只关心xy坐标 , 所以只关注state_dim2 , 这里需要注意的是 , 必须在全局坐标系中报告预测 。
近年来 , 在自动驾驶的探索上 , 无论是汽车企业 , 还是互联网企业都卯足劲 , 投入大量的人力物力进行研发 。
华为八爪鱼(HUAWEI Octopus)自动驾驶云服务为自动驾驶研发企业提供了一站式数据服务、训练服务和仿真服务能力 。 通过自动化数据处理流水线 , 快速支撑开发企业对自动驾驶算法的训练、仿真和调优 。
基于自动驾驶云服务丰富而强大的数据处理能力 , 可实现路测场景自动分类、比例挖掘和数据自动化标注等 , 实现数据集生成效率提升70% , 极大的降低自动驾驶的开发周期和成本 。
文章图片
对于自动驾驶开发企业来说 , 基于数据驱动的机器学习算法成为业界主流 。 但目前以监督学习为主的算法需要耗费大量人力进行数据标注 , 而且还不能有效解决自动驾驶场景中的长尾问题 。
依赖于人工标注的感知模型训练 , 对于亿级路测数据是不具备可行性的 , 因此基于2D和3D的目标检测算法构建路测数据自动标注能力 , 解决人工数据标注瓶颈 , 是推动自动驾驶产业发展的关键一步 。
华为诺亚方舟实验室(Noah CV Lab)涉及计算机视觉 , 语音语义 , 推荐搜索 , 决策推理 , AI基础理论等领域 。
在自动驾驶方面 , 华为智能车云服务产品部和诺亚方舟实验室形成联合攻坚技术团队(Noah CV Lab & Octopus) , 开展自动化数据标识、传感器融合算法、SLAM/VIO算法、智能决策和推理、路径规划和运动控制、智能交通系统模拟仿真等业务方向的研究 。
华为八爪鱼(HUAWEI Octopus)自动驾驶云服务依托联合团队以及诺亚方舟实验室的最新研究成果 , 优化自研算法 , 多项算法模型的精准率达到业界领先水平 。
算法的优劣主要是通过数据集测试结果进行评判的 , 自动驾驶中最重要的测试任务包括了3D目标检测、2D目标检测、语义分割、实例分割、场景流预测、光流预测、深度估计、目标追踪等 。
【检测|华为挑战ICRA2020自动驾驶3D目标检测:刷新纪录、大比分夺冠】
文章图片
其中 , 3D目标检测和2D目标检测是几乎所有自动驾驶数据集都会聚焦的标竿任务场景 。
3D目标检测数据集包括了Kitti、nuScenes、lyft dataset、Waymo open dataset、appllo scape、H3D等 , 其中nuScenes和Waymo是最具份量的测试集 。 2D目标检测则以COCO测试集为标杆 。
华为选择当前业界最具权威性的开源数据集作为算法验证集进行测试 , 通过持续优化算法设计 , 实现数据挖掘算法在数据集上获得SOTA性能 , 以提升华为在自动驾驶数据迭代领域的竞争力 。
推荐阅读








![[游客]犹他州车祸涉事旅行社发布通报,4人死亡18人送医治疗](http://res.cjrbapp.cjn.cn/a/10001/201909/639d1b2078e4dfd12aba61fa66c38e8d.jpeg)


![[]5.12号股票操作分享](http://img88.010lm.com/img.php?https://image.uc.cn/s/wemedia/s/2020/24df3a9b5f82b8f59ea41cd17be18cac.jpg)

- 新冠|美国多数州拒绝遵循美国政府的新冠病毒检测指南
- 香港|香港普及社区检测计划29日开始预约 两小时约3万港人预约参与
- 财报|华为最新财报出炉!上半年日赚近2.4亿
- 成像|AI显微成像:快速检测有害细菌
- Xiaomi|华为入冬,小米回春
- Huawei|华为鸿蒙OS手机何时推出?余承东回应:今年先不发布 明年有可能
- Huawei|余承东:华为正在想办法应对禁令
- 马克龙:不排除任何公司参与法国5G建设,包括华为|马克龙:不排除任何公司参与法国5G建设,包括华为
- 华为|任正非:美国一些政治家希望华为死 求生欲使华为振奋
- 华为|踏浪同行!253家财富世界500强企业携手华为共创行业数字化